Double Pendulum - sonification details
Introduction
The tutorial for this project is taken from the book: An Introduction to Computer Simulation Methods, 2nd Edition, Harvey Gould, Jan Tobochnik, Addison Wesley, 1996. It was elaborated in a course on computational physics by Prof. Chr. Gattringer.
A pendulum (consisting of a weight of mass m and a massless cord of length l) is hanged on a solid ceiling; on this first a second, identical pendulum is fixed. The system has two degrees of freedom: it may only move in a plane. Energy is conserved (there is no friction), thus it is a hamiltonian system, which may be described by its canonical momenta, p_1 and p_2 respectively, and its canonical coordinates (the angles),q_1 and q_2. Depending on the initial conditions, the system behaves regularly or shows chaotic evolution.
This physical system is numerically modeled using the forth-order Runge-Kutta Method. This is an iterative method for solving differential equations numerically, the error of the solution being of the order of the step size to the power of 5.
Classical Analysis vs. sonfication
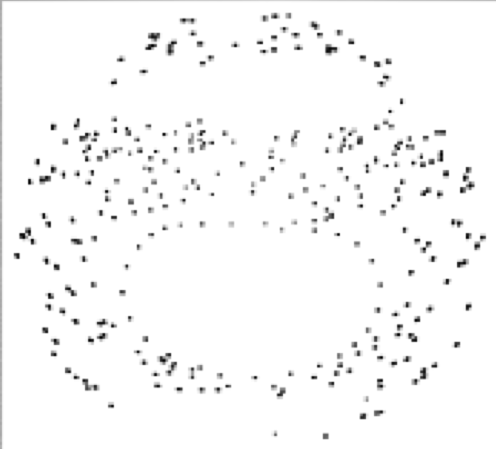
In a visualization, usually a Poincare-plot is done. Two parameters of the system are chosen, and the values of the others are fixed in phase space: e.g. in this plot, points were plotted whenever q_2 = 0 and p_2 > 0. A regular behavior would show as closed loops in such a plot. The plot here shows chaotic behavior; some regions are never reached by the system, and this may be interpreted. In a Poincare plot, there is no time axis.
In a sonification, one has the possibility to keep the physical time and still display all of the system's parameters: this was done by mapping the angles to frequencies (modulating two sine waves) and the coordinates to the amplitude of the two channels. Regular behavior results in a periodic signal and may easily be distinguished from a quasi-periodic and chaotic signal. Also another sonification using rhythm was done.
References
For a detailed description please refer to Project description (pdf) .
- Audiofiles (mp3):
- Double Pendulum 01 - Amplitude and Frequency modulated - at original speed (parameter velocity = 1)
- Double Pendulum 01 - Amplitude and Frequency modulated - velocity = 50
- Double Pendulum 02 - Amplitude and Frequency modulated - velocity = 50
- Double Pendulum 01 - Amplitude and Frequency modulated - velocity = 0.3